Intrinsic Absorption and Viscoelastic Bodies¶
OpenSWPC adopts the generalized Zener body (GZB) as a model of the
viscoelastic body. It consists of several viscoelastic Zener bodies with
different relaxation times to attain nearly constant in a wide
frequency range. As a consequence, it accompanies the
frequency-dependent body wavespeed via physical dispersion (e.g., Aki and Richards, 20021); therefore, users should specify the reference frequency in which the velocity model is given.
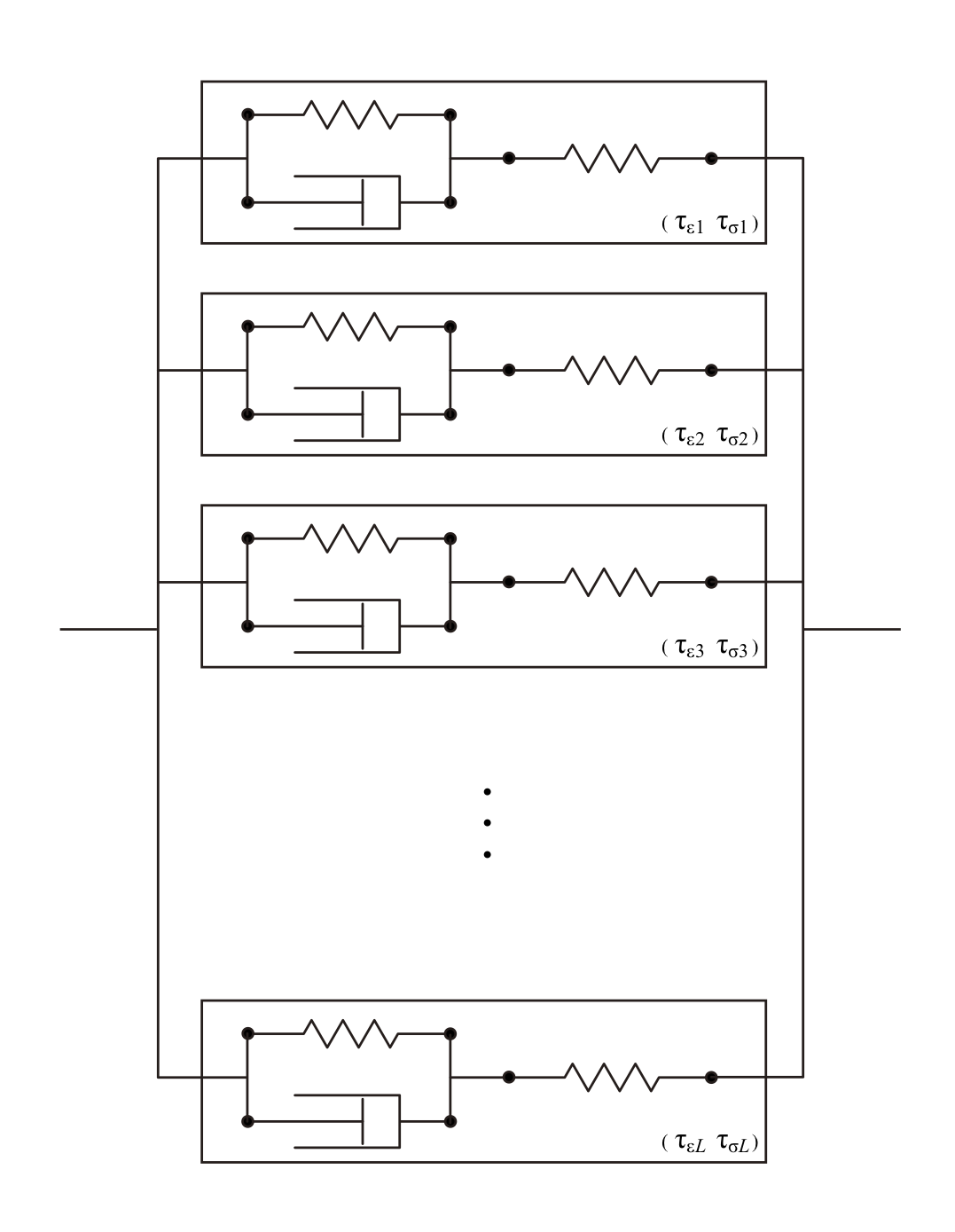
A schematic illustration of the Generalized Zener body. Zener Body (boxes) having different chracteristic times are connnected.
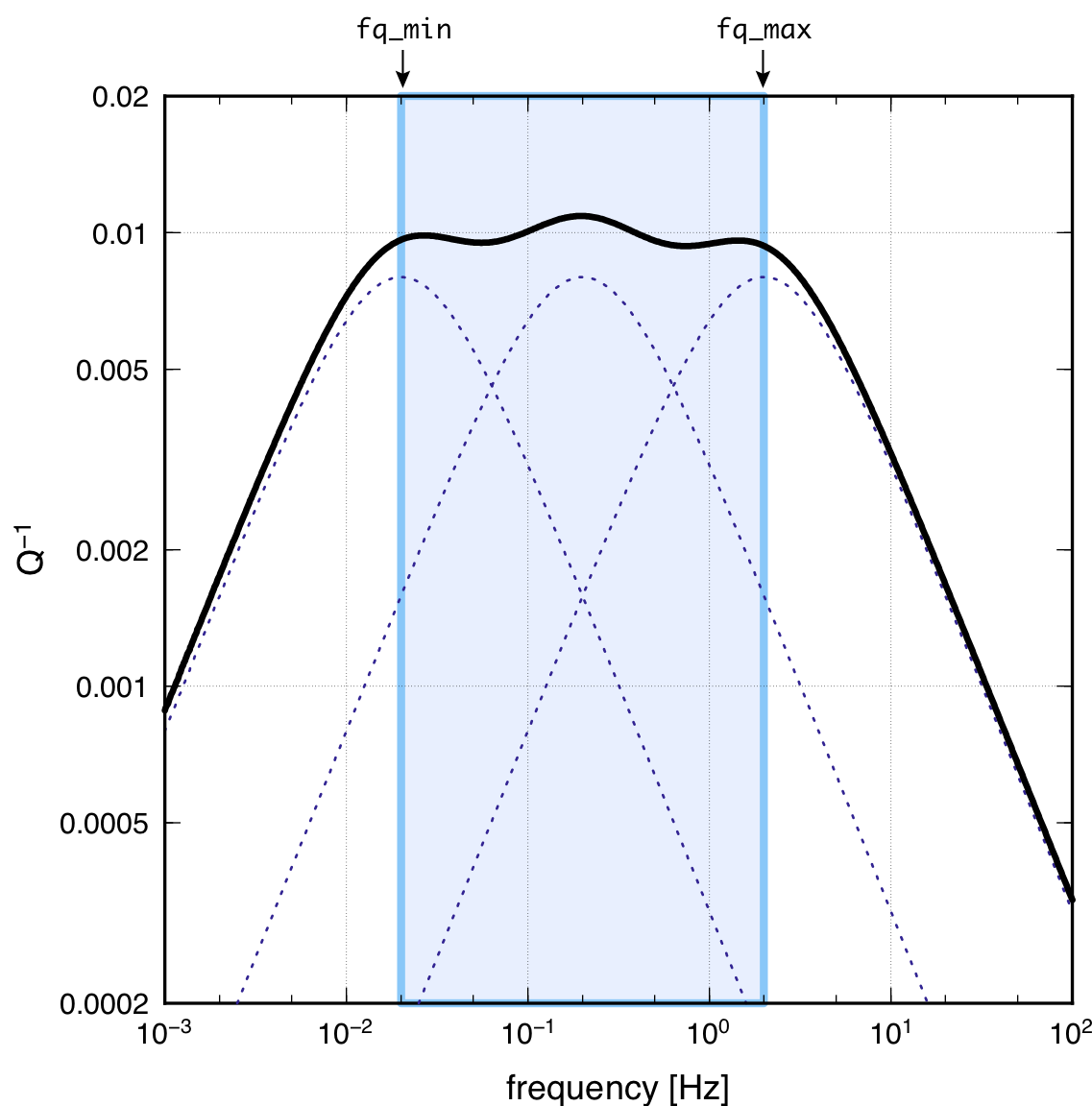
Example of frequency dependence of the intrinsic attenuation for a GZB of NM=3. The thick solid line shows the attenuation of the entire model, while the dotted lines show the attenuation model for each constituent of the Zener body. The vertical lines show the specified minimum and maximum frequencies for the constant range.
GZB consists of Zener bodies, as schematically shown in the Figure above. This viscoelastic body is described by the relaxation functions for an elastic moduli and , as
where is the relaxation time of the -th body, and are the relaxed moduli, and and are creep times of the P- and S-waves, respectively. The wide frequency range of constant is achieved by connecting Zener bodies with different relaxation times. In addition, the intrinsic attenuations of the P- and S-waves ( and , respectively) can be defined independently by choosing different creep times between the elastic moduli and .
The convolution appearing in the constitutive equation can be avoided by defining the memory variables (Robertsson, 19942) and solving the auxiliary differential equations for them. We also adopt the -method of Blanch (19943) to automatically choose the creep times that achieve a constant condition.
Parameters
fq_min- Minimum frequency of the constant- model.
fq_max- Maximum frequency of the constant- model.
fq_ref- Reference frequency at which the velocity model is given.
The value becomes nearly constant between the frequencies of
fq_min and fq_max.
Outside of the band, the attenuation becomes weaker with increasing/decreasing
frequency. As shown in this figure, the nearly constant is
achieved using three different viscoelastic bodies. If one needs to make
constant over a wider frequency range, the hard-coded parameter
NM should be increased. However, this leads to a significant increase
in the memory usage and computational loads. The frequency dependence of
with the parameters specified above can be investigated using
the program qmodel_tau.x.
Note that velocities of P and S waves depends on a frequency if one use constant- model at a wide frequency band.
A parameter fq_ref is used as a reference frequency at which the input velocities are defined.
-
Aki, K., & Richards, P. G. (2002), Quantitative Seismology, 2nd Edition, University Science Books. ↩
-
Robertsson, J. O., J. O. Blanch, and W. W. Symes (1994), Viscoelastic finite-difference modeling, Geophysics, 59(9), 1444–1456, doi:10.1190/1.1443701. ↩
-
Blanch, J. O., J. O. Robertsson, and W. W. Symes (1994), Modeling of a constant Q: methodology and algorithm for an efficient and optimally inexpensive viscoelastic technique, Geophysics, 60, 176–184, doi:10.1111/j.1365-246X.2004.02300.x. ↩